
Una vez ya terminado el diseño de nuestro robot seguido del manual que trae nxt, nos disponemos a llevar a cabo una serie de ejercicios básicos.
1.1 El Cuadrado
Después de haber aprendido funciones básicas de los motores, nos disponemos a llevar a cabo un ejercicio que nos dará la diferencia de lo que nosotros queremos y lo que realmente es el resultado.
Lo primero, es buscar un buen sitio para colocar nuestro lápiz, ya que vamos a necesitar que nuestro robot pinte su trayectoria, la mejor posición es la que está en el centro del eje, ya que al girar, si el lápiz está colocado en el centro, este no verá modificada su posición en el plano.
Con la mayor precisión que hemos podido y con la ayuda de nuestro viejo compañero el celo, hemos colocado un lápiz en el eje de esta forma:


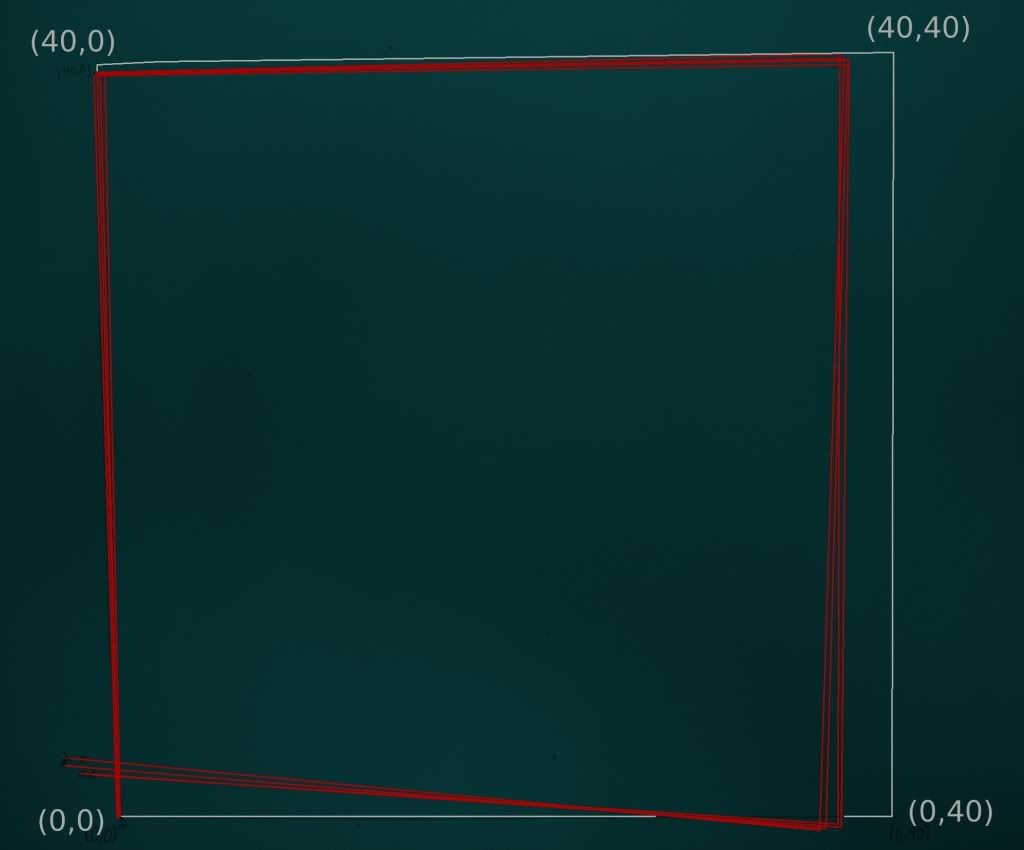
Ahora, queremos pintar un cuadrado de 40x40 (linea blanca), pero como podemos observar en la imagen inferior, Viva Bender ha pintado su propio cuadrado de 40x40 (linea roja), muy diferente de la teoría. Esto se debe principalmente a nuestro diseño del robot, distancia entre las ruedas, resistencia con el lápiz al pintar,orientación manual de nuestro robot...etc, una serie de parámetros que dificultan la realización correcta de nuestro objetivo. Cuanto mas preciso sea nuestro robot, mayor aproximación a la teoría, pero en la práctica hay dificultades.
1.2 Calculo Matriz de Covarianza
Como siguiente ejercicio, realizamos el cálculo de la matriz de covarianza, a partir de la siguiente fórmula:Nos disponemos a recorrer un metro con nuestro robot desde un " mismo punto inicial " (entrecomillado por la inexactitud del mismo). El objetivo es comprobar que a medida que avanzamos el grado de incertidumbre aumenta y su distancia también, ya que cuanto mas pegado al eje x (0) mayor distancia recorre y cuanto mas se aleja de y menos distancia recorre en x. (linea roja, trayectorias del robot)
Tomamos 10 medidas: X Y 1. (97'9,1'2)
2. (97'9,0'4)
3. (97'8,-0'2)
4. (98'1,-0'2)
5. (98'0,-0'4)
6. (98'1,-0'6)
7. (97'9,-0'7)
8. (97'8,-0'8)
9. (97'9,-1'9)
10.(98'1,-2'6)
media(97'95,-0'58)
Matriz P (0'0125 -0'0388)
(-0'0388 1'0336)
1.3 Visualización de la trayectoria
Por último, queremos mostrar el recorrido que realiza el robot en la pantalla, para ello solo programamos que hiciera un recorrido (mostrado en el segundo video), y que a su vez fuese dibujando en tiempo real su trayectoria.
Las fórmulas para el cálculo del desplazamiento y el cálculo del ángulo son :
(Desplazamiento)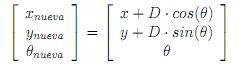
(ángulo)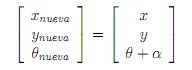
Esta muestra es sencillamente fácil, solo hay que tener en cuenta la posición actual del robot y los ángulos hacia donde gira el mismo.
Limitaciones: (La pantalla no es infinita, nuestro recorrido se ve completamente porque está dentro de los márgenes de la pantalla).
(Trayectoria dibujada por VB)
1.4 Conclusión:
Aproximar la teoría a la práctica es bastante complicado, lo que para el robot creé ser correcto, en nuestra realidad hay imperfecciones, ya que no realiza la trayectoria con bastante perfección por ejemplo.
La situación en la que se encuentre también es un factor importante, porque la superficie de apoyo afecta directamente al correcto funcionamiento, se producen resbalones en superficies pulidas, no funciona bien en superficies con cierto ángulo etc...
Aún con todo ello, el robot es suficientemente preciso en las tareas que hemos realizado.
No hay comentarios:
Publicar un comentario