
Punto 1.
Distancia mínima = 22cm (20cm reales)
Distancia máxima = 193cm (190cm reales)
Por debajo de los 20cm el sensor ofrece lecturas pero con un error cada vez mas grande, la mínima lectura que observamos fue de 7cm (estando a 4cm reales), como vemos es un error enorme y decidimos que las medidas de las que nos podemos empezar a fiar estan en el rango puesto arriba.
Como veremos a continuación en valores intermedios de este rango el error del sensor baja bastante hasta ser prácticamente cero para distancias medias.
Punto 2
Ahora medimos la sensibilidad del sensor frente a los obstáculos situados en ángulo, realizando las pruebas que se nos indican en el enunciado los resultados fueron los siguientes:
0º − 37cm
10º − 38cm
20º − 38cm
30º − 40cm
40º - 41cm
-10º − 38cm
-20º − 40cm
-30º − 41cm
-40º - 44cm
Para inclinaciones mayores (de 50º en adelante) el sensor se salia de rango mostrando 255 de modo que podemos deducir que nuestro sensor es fiable para ángulos de aproximación menores de 50º.
Se supone que los pares de ángulos (Xº/ -Xº) deberían dar lecturas idénticas, en nuestro caso aunque se aproximan no llegan a serlo, esto puede deberse simplemente a colocaciones ligeramente diferentes en cuanto a los ángulos positivos y negativos, no se puede atinar exactamente con el mismo ángulo siempre.
Punto 3
En esta prueba realizamos medidas a las distancias indicadas en el enunciado y en cada una de ellas el sensor de VivaBender detectaba siempre 1cm por encima de la medida real de modo que según nuestros datos la media de error era igual a 1cm. Si tenemos en cuenta posibles errores mínimos en la posición exacta del robot a la hora de medir llegamos a la conclusión de que para el rango estudiado el sensor de ultrasonidos es muy preciso.
Punto 4
Este punto fue el más tedioso en cuanto a mediciones se refiere, realizamos las múltiples medidas que se nos pedían en el enunciado, no vamos a poner aqui la larga lista de números obtenidos asi que los resumiremos directamente en las ecuaciones de la matriz de covarianza.
Siguiendo la fórmula empleada anteriormente en la práctica 1:

Obtuvimos los siguientes resultados:
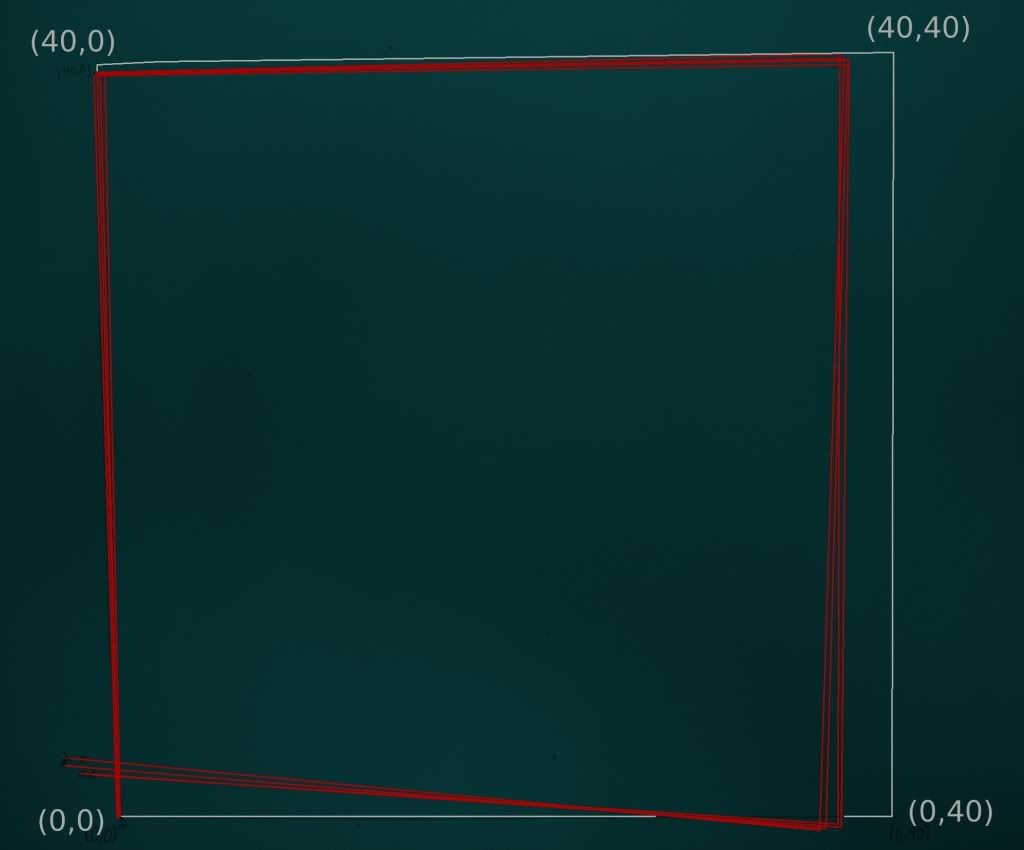
Observamos que el error en X es bastante pequeño, no asi como el error en Y, y como hay una relación entre ambos ejes, cuanto mas aumenta X mayor error hay en Y, para observar mejor este aspecto podemos observar la siguiente gráfica.


En ella vemos representado el cono de apertura del sensor (como era de esperar el sonido se expande cuanta más distancia recorre), este cono debe ser simétrico hacia las Y negativas (no representado en la gráfica). No sale un cono suave como cabría esperar pero esto es debido a la dificultad de realizar mediciones precisas que nos hubieran dado un cono mucho mas "continuo".
Hasta aquí la calibración del sensor de ultrasonidos, hemos obtenido resultados algo sorprendentes (no esperabamos tanta precisión en rangos medios) y resultados esperados (como la representación del cono de apertura), en conclusión teniendo en cuenta las limitaciones en distancia y ángulo de nuestro sensor podemos decir que los datos que nos envia son bastante exactos de acuerdo a la realidad.






{kind=link}